

Immer wieder taucht die Frage auf was den so ein FPV Copter kostet, resp. was für Komponenten man am besten darin verbaut. Deshalb habe ich mich entschlossen, pralell zum Aufbau meines 7″ Copters einen Aufbaubericht zu schreiben. Dies inklusive Zusammenstellung möglicher Komponenten.
Vorwort
Es gibt kein Richtig oder Falsch. Sprich, dieser Bericht wiederspiegelt meine Auffassung eines Setups. Andere Piloten würden dies evtl. auch ganz anders lösen. Jeder Copter ist daher einzigartig und nach den vorlieben des Piloten zusammengebaut. Die in diesem Beitrag enthaltenen informationen sollen nur Hilfen für Einsteiger sein. Auch ist die Liste der Teile bewusst recht kurz gehalten. Wer dennoch findet es fehlt etwas wichtiges kann es mich gerne Wissen lassen.
Überlegungen zum Anfang
Bevor man überhaupt einen Copter baut, sollte man sich folgende Frage stellen:
- A: Welcher Zweck hat der Copter?
- B: Welche Komponenten sollen verbaut werden?
Denn je nach dem eignen sich nicht alle Frames. Auch bei den Motoren oder Propellern gibt es markante Unterschiede. So werden bei Racern in der Regel 5″ Propeller mit Motoren von 2200-2700KV verbaut. Bei Freestyler oder Longrange Coptern sind es eher 6-7″ Propeller mit Motoren um die 1300-2200KV. Wobei dies nur Grundwerte sind die sich auf ein Setup mit 4S Akkus beziehen.
Komponenten & Kosten
Ob nun 5″ oder 7″ macht kostentechnisch keinen grossen Unterschied.
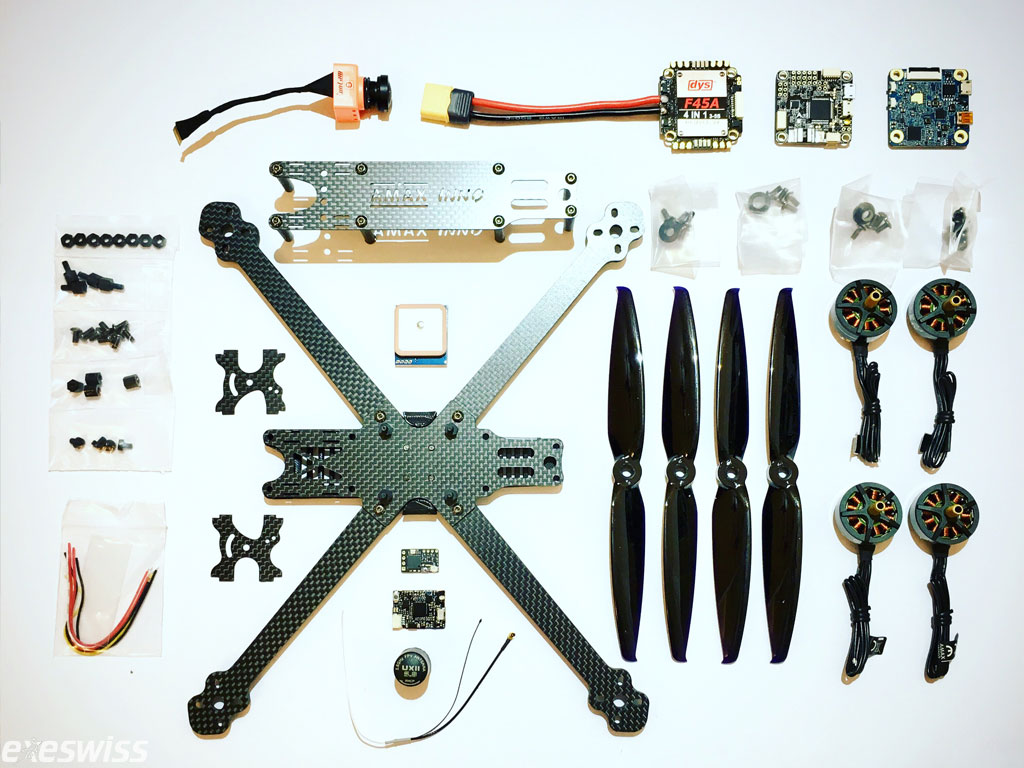
Nachfolgend eine Übersicht einzelner Komponenten die für einen 7″ Copter geeignet wären. Natürlich muss darauf geachtet werden, dass die einzelnen Komponenten untereinander kompatibel sind. Kleinteile wie Antennen, Propeller etc. habe ich bewusst nicht in die Liste mit aufgenommen. Es gilt auch zu beachten, dass diese Zusammenstellung bei weitem nicht alle Komponente abdeckt. Jeder hat so seine vorlieben. Ich bin beispielsweise eher der Betaflight Typ…
Komponenten die mit „**“ markiert sind wurden in meinem 7″ Copter verbaut. Das Ganze ist aufsteigend nach Preis sortiert.
Frames
- Realacc Martian IV 7″ 300mm = CHF 32.-
- AMAXinno Freestyle 7″ 290mm = CHF 42.- **
- FPVFrameCH DiveX 7″ = 105.-
Motoren
- AMAXinno 2306-1500KV 4x = CHF 90.-
- AMAXinno 2306-1800KV 4x = CHF 90.-
- AMAXinno 2307-1500KV 4x = CHF 100.- **
- AMAXinno 2307-1800KV 4x = CHF 100.-
- XNOVA Lightning 2207-1650Kv 4x = CHF 102.-
- XNOVA Lightning 2207-1700Kv 4x = CHF 102.-
- AMAXinno 2308-1500KV 4x = CHF 108.-
- AMAXinno 2308-1800KV 4x = CHF 108.-
- TBS Endurance 2206-1450KV 4x = CHF 108.-
Regler
- Lumenier BLHeli 35A 4in1 = CHF 58.-
- DYS Aria F45A 45A 4in1 = CHF 60.- **
- DALRC Engine 40A 4in1 = CHF 65.-
- Hobbywing XRotor 45A 4in1 = CHF 65.-
Flugcontroller
- DYS F4 Pro V2 AIO = CJF 40.- **
- Matek F405-CTR F4 AIO = CHF 45.-
- HobbyWing XRotor F4 AIO = CHF 48.-
- SP Racing F7 AIO = CHF 50.-
- BrainFPV Radix F4 AIO = CHF 59.-
Videosender 5.8Ghz
- TBS Unify Pro 5G8 HV RACE = CHF 31.-
- ImmersionRC Tramp HV = CHF 40.-
- TBS Unify Pro 5G8 V3 = CHF 43.- **
- TBS Unify Pro 5G8 HV = CHF 53.-
- FuriousFPV Stealth VTX = CHF 55.-
Kamera
- RunCam Micro Sparrow 2 = CHF 35.-
- RunCam Racer = 42.-
- RunCam Micro Eagle = CHF 45.- **
- RunCam Split 2 = 85.-
RC Empfänger
- FrSky R-XSR 16CH = CHF 26.-
- TBS Crossfire Nano RX = CHF 42.- **
- TBS Crossfire Micro RX V2 = CHF 47.-
GPS
- Beitian BN-180 GPS Modul = CHF 9.- **
- Beitian BN-280 GPS Modul = CHF 10.-
- NoName GPS Modul = CHF 18.-
- FuriousFPV GPS Modul = CHF 35.-
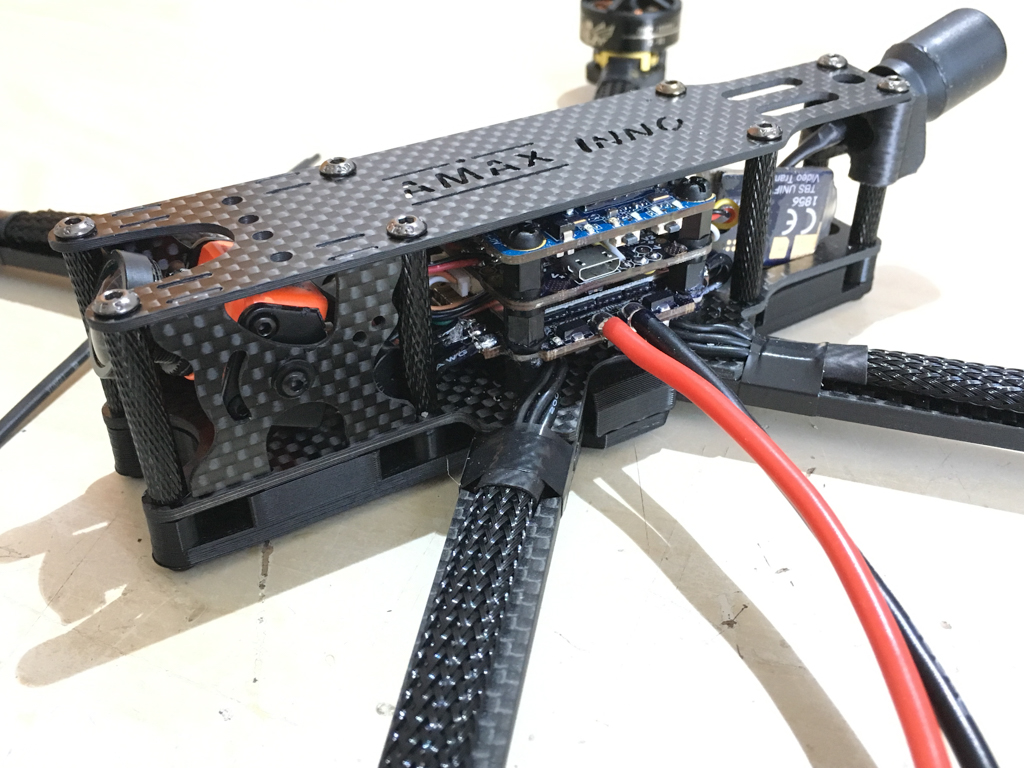
Mein 7″ Copter
Die Kosten meines 7″ Copters belaufen sich auf ca. CHF 430.-. Dazu kommen noch Akkus, Antennen, Propeller und diverse Kleinteil was ein Total von etwa CHF 560.- entspricht. Ich denke damit liege ich im Mittelfeld. Speziell in meinem Fall ist das verbaute GPS-Modul. Dieses dient nicht nur der Positionsbestimmung sowie Angaben über Höhe und Geschwindigkeit, sondern ich möchte damit auch die neuen Rescue Funktion von Betaflight nutzen.
Erst wollte ich noch eine RuncamSplit2 verbauen, da ich so Gewicht einer zusätzlichen HD-Kamera hätte einsparen können. Aufgrund eines Defekts habe ich mich dann aber dagegen entschieden. Letztendlich sind HD-Aufnahmen einer GoPro oder vergleichbarem ohnehin besser und man hat die Propeller nicht im Bild.
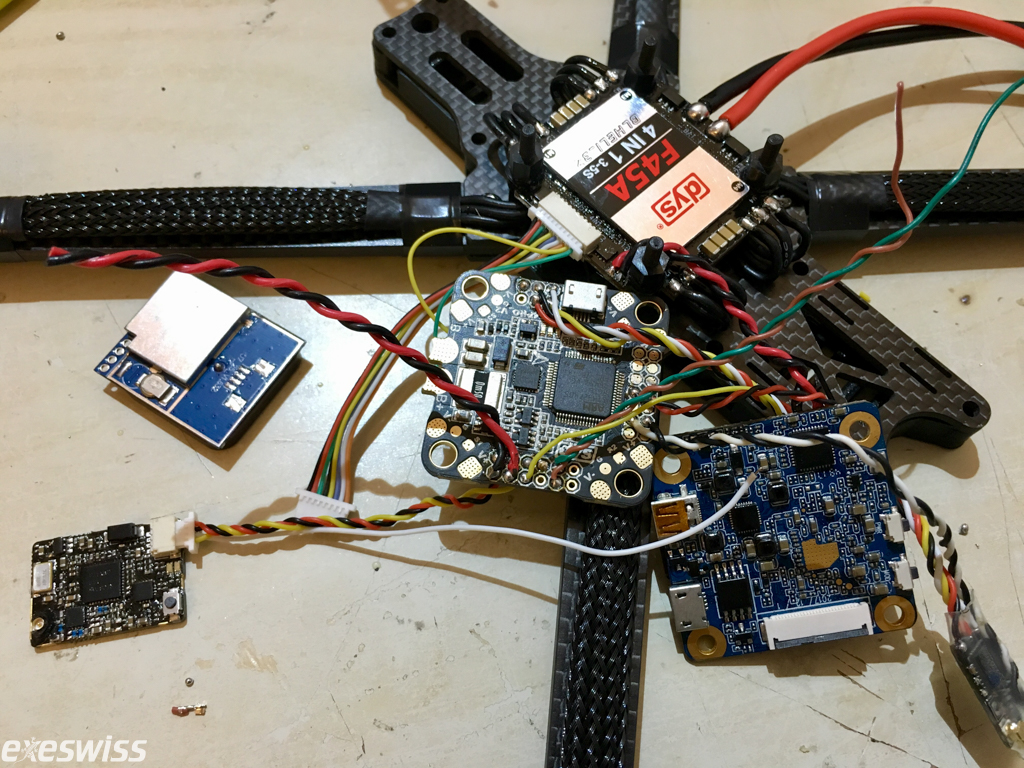
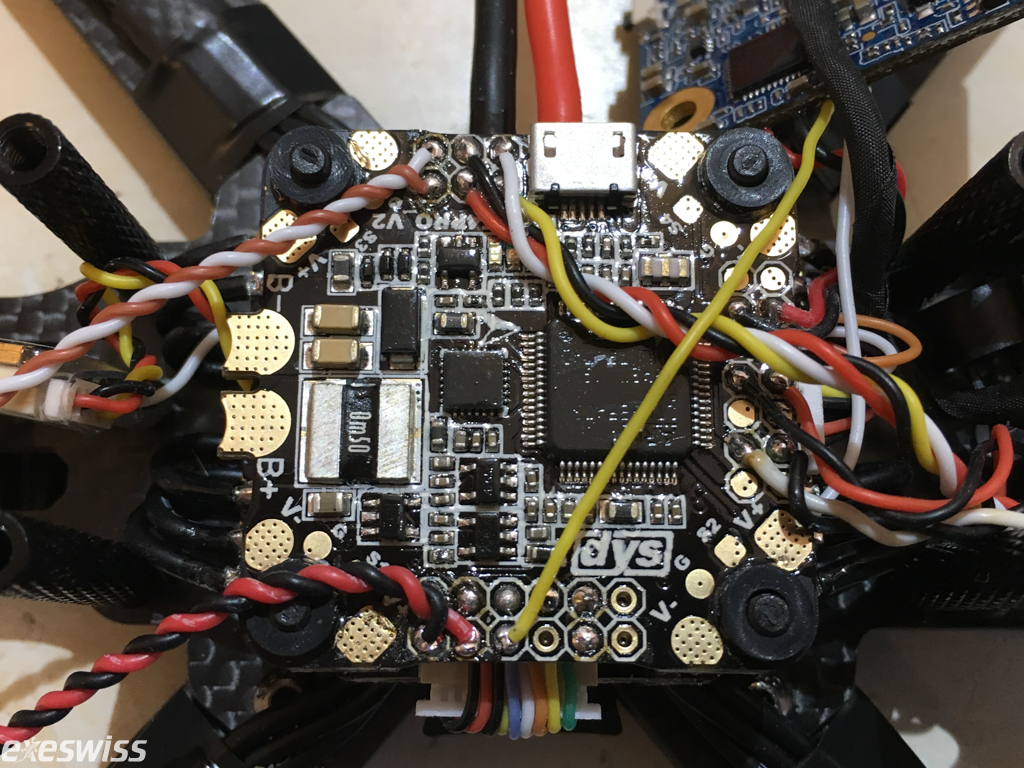
Der Zusammenbau
Einfach mal drauf los, alles festschrauben, verlöten und… ja, man hat was vergessen oder nicht beachtet und muss alles nochmals demontieren. Das ist sehr ärgerlich. Daher am besten mal alles so auslegen wie man es gerne verbaut haben möchte. Ich mach mir oft auch eine Skizze der Verkabelung mit dem FC. So merkt man schnell das der Empfänger dort nicht hinpasst, die Kabel zu kurz sind oder ein Teil fehlt und kann so genug früh reagieren.
Checkliste für den Zusammenbau:
- Ist der Flugcontroller richtig montiert?
- Stimmt die Motorreihenfolge?
- Ist die Polung der Kabel korrekt?
- Ist die verbundene Spannung einzelner Komponenten korrekt?
- Sind alle Kontakte frei und besteht keine Kurzschlussgefahr?
Nach dem Zusammenbau
Passt soweit alles, kann es an die Einstellungen des Flugcontrollers gehen. Am besten lädt man noch die neuste Firmware bevor man mit dem Einstellen beginnt. Anschliessend kann man die Ports für Empfänger, SmartAudio, GPS, Telemetrie, etc. einstellen. Ist dies gemacht kann man Sender/Empfänger Binden und überprüfen, ob das Signal ordnungsgemäs beim Flugcontroller ankommt. Ist dies der Fall, können die einzelnen Kanäle kontrolliert und mit Funktionen belegt werden. Letztendlich folgen noch Feineinstellungen des Flugcontrollers wie PID’s, Rates, OSD, Failsave, etc. Wenn bis hier alles geklappt hat, kann man die ESC’s über den FC noch flashen und anschliessend die Drehrichtung der Motoren prüfen und diese ggf. noch ändern. Passt auch das, steht vor dem ersten Flug nichts mehr im Weg.
Checkliste nach dem Zusammenbau:
- Alles noch einmal sorgfältig überprüfen
- Flugcontroller flashen
- ESC’s flashen
- Ports einstellen
- Sender/Empfänger Binden
- Signaleingang prüfen
- PID’s Rates, OSD, Failsave, etc. einstellen
- Motordrehrichtung prüfen
Der Erstflug
Es ist jedes Mal spannend wie sich ein neuer Copter in die Lüfte hebt und zu beobachten ob er sich wunschgemäss verhält. Mit Betaflight ist es nicht mehr so ein Ding und man ist mit den Grundsettings schon recht gut bedient.
Der neue Rescue Mode von Betaflight schein wenn über einen Schalter ausgelösst zu funktionieren, wenn auch noch etwas zickig. Hier ist noch etwas feintuning nötig. Für einen Failsavetest im Flug mit Rescue Mode bin ich bis jetzt noch nicht dazu gekommen. Auf jeden Fall bin ich aber sehr zufrieden mit meinem 7″ AmaxInno Copter.


Nützliche Links
- Betaflight Handbuch von Seidel Philipp
- GPS-Setup in Betaflight
- BLHeli32 Setup
- Startupsound mit BLHELI32
- LQ/RSSI Crossfire in Betaflight anzeigen
Noch keine Kommentare